Yaskawa Electric Servo Motor InsB 200V SJME-04AMB41-0Y 400W Industrial Servo Motor
Specifications
Current: 2.0A
Volatge: 200V
Power :400W
Rated Torque: 1.27N-m
Max speed: 3000rpm
Encoder: 17bit Absolute encoder
Load Inertia JL kg¡m2¢ 10−4: 0.026
Shaft: straight without key
OTHER SUPERIOR PRODUCTS
Yasakawa Motor, Driver SG- Mitsubishi Motor HC-,HA-
Westinghouse Modules 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc motor A0-
Rosemount transmitter 3051- Yokogawa transmitter EJA-
Contact person: Anna
E-mail: wisdomlongkeji@163.com
Cellphone: +0086-13534205279
Similar Products
SJDE-01APA
SJDE-02APA
SJDE-04APA
SJDE-04APA+SJME-04AMB41
SJDE-08APA
SJME-01AMA41
SJME-04AMA41
SJME-04AWA41
SJME-08AWA41
The inverter consists of three half-bridge units where the upper and lower switch are controlled complimentarily, meaning when the upper one is turned on, the lower one must be turned off, and vice versa. As the power device’s turn-off time is longer than its turn-on time, some dead time must be inserted between the time one transistor of the half-bridge is turned off and its complementary device is turned on. The output voltage is mostly created by a Pulse Width Modulation (PWM) technique, where an isosceles triangle carrier wave is compared with a fundamental-frequency sine modulating wave. The natural points of intersection determine the switching points of the power devices of a half-bridge inverter. This technique is shown in Figure 3-6. The 3 -phase voltage waves are shifted 120o to one another and thus a 3-phase motor can be supplied
The most popular power devices for motor control applications are Power MOSFETs and IGBTs. A Power MOSFET is a voltage-controlled transistor. It is designed for high-frequency operation and has a low-voltage drop, so it has low power losses. However, saturation temperature sensitivity limits the MOSFET’s use in high-power applications. An Insulated-Gate Bipolar Transistor (IGBT) is controlled by a MOSFET on its base. The IGBT requires low drive current, has fast switching time, and is suitable for high switching frequencies. The disadvantage is the higher voltage drop of the bipolar transistor, causing higher conduction losses.

Vector control is the most popular control technique of AC induction motors. In special reference frames, the expression for the electromagnetic torque of the smooth-air-gap machine is similar to the expression for the torque of the separately excited DC machine. In the case of induction machines, the control is usually performed in the reference frame (d-q) attached to the rotor flux space vector. That’s why the implementation of vector control requires information on the modulus and the space angle (position) of the rotor flux space vector. The stator currents of the induction machine are separated into flux- and torque-producing components by utilizing transformation to the d-q coordinate system, whose direct axis (d) is aligned with the rotor flux space vector. That means that the q-axis component of the rotor flux space vector is always zero:

 Your message must be between 20-3,000 characters!
Your message must be between 20-3,000 characters!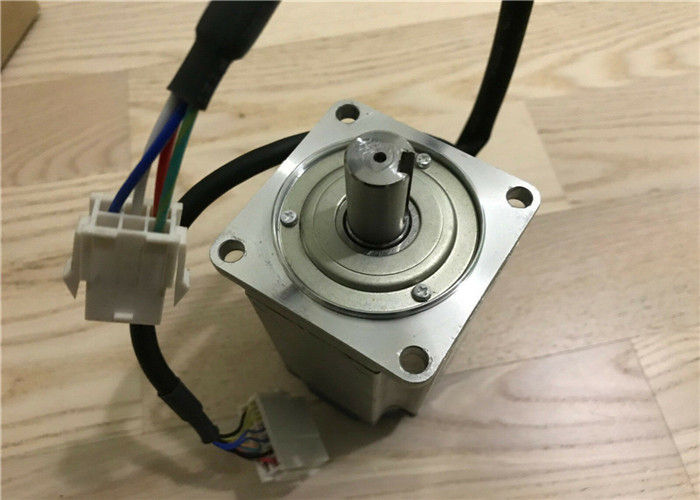
Overall Rating
Rating Snapshot
The following is the distribution of all ratingsAll Reviews